MC664
2种配置

MC664 (-X)
P861 (单核) | P862 (爽核)
MC664-X是一款基于4核Cortex A9 1GHz ARM处理器的高性能和超灵活的运动控制器。内置EtherCAT接口、专用通讯内核,支持多达128轴运动控制,是一款Trio最为通用的控制器。


功能特点
- 多达128轴-包括64个步进/伺服轴和64个虚拟轴
- 4核Cortex A9 1GHz处理器(P862),精确的64位运动计算
- 专用通讯核心
- 内置EtherCAT接口
- EtherCAT、Sercos、SLM和RTEX数字驱动接口
- 直线、圆弧、螺旋线和空间圆弧插补
- 灵活的凸轮曲线,主从运动
- 支持EnDAT、BISS和SSI绝对值编码器
- 硬件连接输出到视觉和激光控制
- Ethernet-IP / Modbus TCP /内置以太网接口
- 灵活的工业通讯Anybus-CC模块,包括ProfiNet/Profibus
- 支持IEC61131-3语言编程
- 支持多任务TrioBASIC语言编程
- 文本文件处理
- 机器人坐标变换
- SD内存卡槽
- CANopen I/O 扩展
- 背光液晶显示屏
- RoHS和CE认证
EtherCAT轴扩展
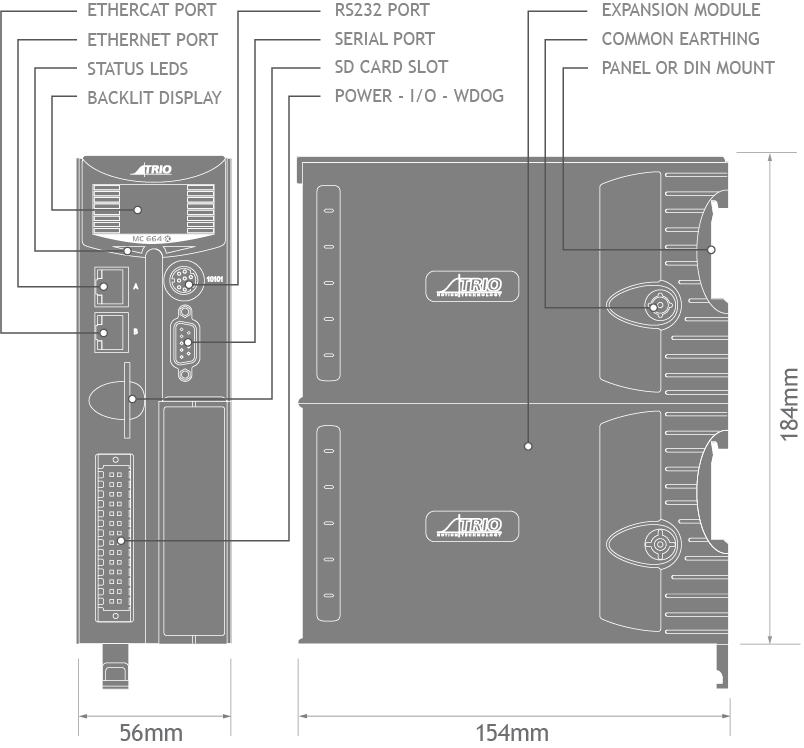
内置的以太网端口可用于编程及与通用HMI和PLC通讯,包括UNIPLAY触摸屏直连到MC664控制器。
可购买P914远程轴功能使能码升级内置的两个EtherCAT轴。
每个P914都使以下轴数扩展两倍:
P862 + 1 x P914 = 4个远程轴
P862 + 2 x P914 = 8个远程轴
P862 + 3 x P914 = 16个远程轴
P862 + 4 x P914 = 32个远程轴
P862 + 5 x P914 = 64个远程轴
P862 + 6 x P914 = 128个远程轴
每个轴都可通过编程实现各种运动,如进行直线、螺旋线、空间圆弧插补、电子凸轮和主从运动以及电子齿轮等运动。四核1GHz处理能力支持多种机器人算法同时进行。
基于功能强大的Motion Perfect应用开发软件,用户程序可用具有多任务特点的TrioBASIC语言编写,令复杂的运动变得简单化。同时也可使用支持全功能的PLC编程系统的工业标准IEC61131-3语言编程。

以太网

内置的以太网端口可用于编程及与通用HMI和PLC通讯,包括UNIPLAY触摸屏直连到MC664控制器。
简单易用

通过明亮易读的背光显示屏可以轻松获悉控制器的状态。
高速!

MC664-x有专用的运动和通讯核心,四核处理能力,支持多种机器人算法同时进行。
MC664单核和MC664-X四核模式都适合多轴设备和机器人应用。
底座

底座采用单体金属外壳,增强了系统的接地性能,提高了系统在工业现场的抗干扰能力。
扩展
可通过连接7个半高扩展模块或3个全高扩展模块配置用户应用。通过扩展模块,MC664可支持多达64个网络数字驱动器、24个模拟量伺服驱动器、25个脉冲方向驱动器以及25个绝对值和增量式编码器。
扩展模块支持多种接口,如驱动网络接口、模拟量伺服接口,脉冲方向接口,绝对值或增量式反馈以及精确的硬件色标接口。

 Specification
Specification







