应用
Trio 产品几乎遍布全球各个行业。
| 5轴关节型工业机器人 | |
|---|---|
硬件 控制器 :MC405 / MC4N-E 轴:5 驱动器:Leadshine /RTA Ethercat 好处
|
 |
| 三轴机器人 | |
|---|---|
硬件 控制器 :MC4N-ECAT 轴:3 驱动器:? 这款三线性轴 Delta 机器人专为需要加快三明治制作过程的特定客户而开发。 该机器人设计用于在低温清洁区域工作,而不会影响生产过程。客户需要一种解决方案,不仅要控制机器人,还要控制传送带和附近的工作区域,在这些区域中传感器监控环境是否存在任何永久危险。 所有这一切都是在一个简单的编程环境中实现的:Motion Perfect。 好处
|
 |
| 纸杯四色柔印冲孔机 | |
|---|---|
硬件 控制器 :MC4N 轴:14 驱动器:埃斯顿 + RTA 好处
|
 |
| 立式包装机 | |
|---|---|
硬件 控制器 :MC6N 轴:4 驱动器:ProNet Plus+EM3A 界面:ESV-0097N 埃斯顿的立式包装机是一种常见的包装机。适用于各种粉末、颗粒、片剂等物料的包装 进料,塑料薄膜通过薄膜圆筒形成圆柱形,通过热封辊纵向缝边,横切封底。将包装放入袋中并水平密封 |
 |
| 低压装瓶厂 | |
|---|---|
硬件 控制器 :MC403 + P326 CAN 模拟模块 轴:1 伺服 + 1 编码器 + 4 传送带 VFD 驱动器:松下伺服 好处
|
 |
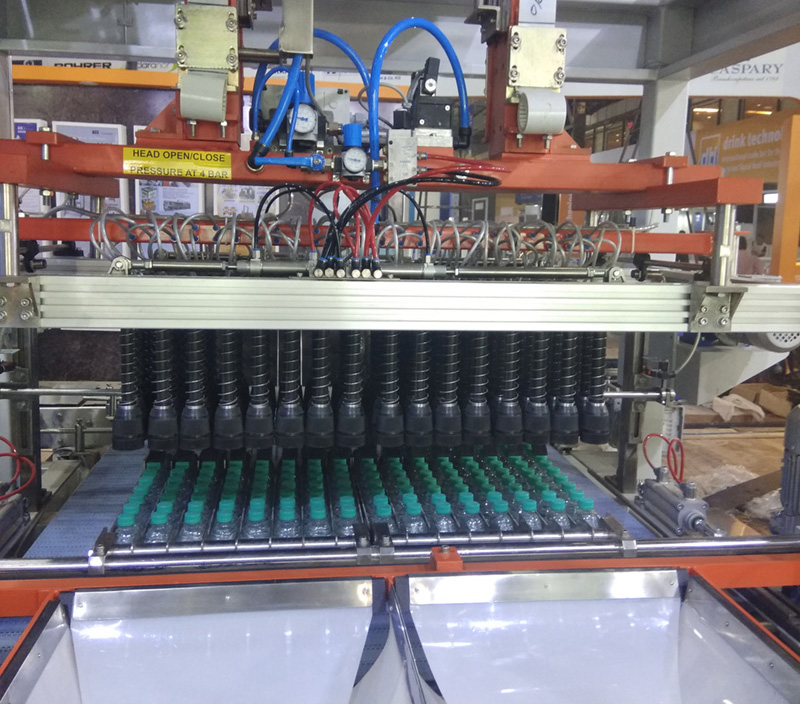
| ROBAX 打包机 | |
|---|---|
硬件 控制器 :MC4N-ECAT 轴:2 驱动器:埃斯顿伺服 Robax 包装机是一种自动拾取和放置系统,采用单皮带配置进行 XY 运动。这一次可以拾取 45 - 95 个瓶子,这些瓶子被放置在板条箱或瓦楞纸箱中以进行进一步包装。 好处
|
 |
| 套筒的应用和瓶子的方向 | |
|---|---|
硬件 控制器 :MC4N 轴:10 驱动器:Delta A2 以太猫 好处
|
 |
| 金属盒包装 | |
|---|---|
硬件 控制器 :MC403 轴:3 驱动器:埃斯顿 好处
|
 |
| 纸箱折叠 | |
|---|---|
JD Innovation 专注于改造纸盒折叠机。运动协调器控制连接到挂钩的伺服电机。使用单独增量编码器输入上的快速注册输入记录纸箱位置。系统使用 CAMBOX 运动命令相对于增量编码器定位挂钩。 对于多达 2 个挂钩,系统设计有一个运动协调器,如图所示。运动协调器配备了一个以太网子板,用于与 Pro-Face 触摸屏进行通信。对于具有 2 个以上挂钩的机器,相同的以太网网络允许运动协调器进行通信。 |
 |
| 液体灌装机通过运动控制解决方案提高生产力 | |
|---|---|
一家液体灌装机制造商在从 PLC 系统升级到运动控制解决方案后,将机器速度提高了 8%,并将机器效率提高到 91%。液体灌装小袋和管包装解决方案提供商 Unette 集成了 Trio Motion Technology 的完整机器控制包,包括控制器、伺服驱动器和电机,以提高其整体生产力。升级还提高了可靠性,减少了停机时间,并实现了更快的机器设置。 Unette 成立于 1962 年,为包装行业中独一无二的成型、填充和密封工艺制造和运营定制机械。Unette 的客户涵盖所有类型的液体灌装,包括洗浴用品、营养保健品和药品,其中包括全球家居品牌,他们选择 Unette 是因为他们的服务速度和质量以及专业精神。该工厂位于英国柴郡,拥有超过 50 人的团队,每周可进行 185 万次给药周期。该集团还在美国新泽西州设有工厂,另有 250 名员工。 挑战 Unette 过去使用凸轮驱动的机器,开始将运动控制与伺服和步进电机结合起来,以提高速度和精度。凭借其两轴灌装和印刷机,管材在循环灌装产品之前单独成型。然后将它们模切成型、多编码并附上任何附件。 凸轮分度器移动固定管子的旋转转盘,直到板处于正确位置。在那个阶段,一个伺服轴控制分配介质的灌装头的运动,另一个控制薄膜的运动,以便在管上施加品牌和产品信息。这两个动作必须与主凸轮同步,并且必须在正确的时间进行协调,以确保填充和套印的准确性。该过程还必须高速实施,以满足苛刻的生产率。 以前,Unette 使用带有多个供应商的伺服封装的 PLC 来实现运动控制。然而,为了提高生产力,需要提高填充和印刷套准的准确性,以及控制速度。累积的错误也降低了可靠性,并且为系统内的各种组件使用不同的供应商导致缺乏兼容性。 “让 PLC 协调运动会产生准确性和可靠性方面的问题。我们想要一种具有更高生产力的稳定方法,”Unette 创始人兼首席工程师 Martyn Hudson 说。 “PLC 不仅无法达到控制水平,而且我们无法让 PLC 和伺服驱动器快速可靠地相互通信,而且两家供应商都无法解决这些问题,”Martyn 补充道。“我们想要一种更简单的方法。事实证明,使用运动控制器不仅更有效,而且还为我们节省了资金,并使技能较低的员工更容易进行更改。” 提高生产力 Trio 安装了一个完整的机器解决方案,包括其高度紧凑的 Flex-6 Nano 运动协调器和双核处理器,以及两个 Trio DX4 伺服驱动器和 Trio MX 系列伺服电机。Flex-6 Nano 控制从进料到出料的整个过程,包括包装和灌装。 通过 Trio 完全集成的运动控制解决方案提高了效率,该解决方案减少了停机时间,从而提高了生产力。不仅机器速度提高了 8%,机器的日效率也提高到了 91%,Unette 相信这个数字可以进一步提高。 Trio 的协调器不仅增强了机器的运动控制,而且还可以控制所需的逻辑功能。“Trio 运动协调器现在管理以前由 PLC 负责的过程控制区域,”Martyn 说。“这意味着运动协调员还可以控制计时器和计数器,例如管理用于在线过程控制的移位寄存器,以确保我们没有任何有缺陷的包装从成品输送槽中出来,否则会涉及更多的停机时间或降低批次质量。” 快速、简单的设置 Trio 的运动协调器复制了机器的原始运动控制命令,并结合了通过 IEC 61131-3 编程添加的所有 PLC 控制的复制。控制器和驱动器的设置在 Trio 的 Motion Perfect 软件中进行,无需特殊编程,应用程序在 Trio 控制器的标准功能上运行。对于 Unette,Trio 系统由单个软件程序管理是一个优势。 “该软件实现了我们之前在多个单独平台上尝试的功能。由于该软件将控制器和伺服系统互连,因此更加用户友好,有望为我们在安装和调试未来机器时节省大量时间和成本。” Trio 的互连机器解决方案减少了对硬接线的要求,因为不同供应商的设备之间不需要交叉寻址。在编程方面,新解决方案为 Unette 节省了大量资金,该公司通常根据客户的要求每隔几天重新编程一次机器。 “未来,开发新代码的需求将越来越少。这将为我们节省大量时间,并加快每个新应用程序的开发速度,”Martyn 说。 易于集成 除了快速调试之外,Trio 硬件在物理上很容易集成到 Unette 的现有机器中。袖珍型 Flex-6 Nano 高度仅为 147 毫米,相当于一个 I/O 切片的宽度,而伺服驱动器是其额定值中最紧凑的驱动器之一。 Trio 的产品还向后兼容支持 20 多年,这仍然适用于许多仍在使用的 Trio 早期控制器。这是 Unette 的一个关键领域。 “我们对机器进行了过度设计,以保持它们的灵活性并长期在现场使用,因此我们需要保证对旧产品的支持和兼容性,包括向后兼容性,”Martyn 说。“例如,我们在 1966 年安装后刚刚使一台机器下线,因此我们需要长期支持。” 未来发展 Unette 共有 20 多台机器,现在有三台机器使用完整的 Trio 解决方案运行,该公司将开始将其他机器迁移到 Trio。Unette 还将实施额外的控制,例如将插入物放入软包装中的拾取和放置。 虽然 Unette 对工时和可靠性方面的长期效率提升充满信心,但该公司报告说,该软件包比其他供应商经济性大约 8%,从一开始就已经实现了节省。 |
 |


